Ondas de gravidade em fluidos
Referência : Lage, E., (2022) Ondas de gravidade em fluidos, Rev. Ciência Elem., V10(3):038
Autor: Eduardo Lage
Editor: João Nuno Tavares
DOI: [https://doi.org/10.24927/rce2022.038]

Resumo
Atirar uma pedra a um tanque ou o pingar de uma gota numa bacia com água são excelentes oportunidades para se observarem e estudarem as ondas de gravidadea, um importante tópico da mecânica de fluidos[1]. Estes exemplos não podem esquecer que este conceito também se aplica a ondas no mar, a rios ou lagos, a diversos fenómenos atmosféricos ou simplesmente ao fluido que enche um copo ou uma proveta[2].
Uma onda de gravidade é um fenómeno periódico, no tempo e no espaço, que se manifesta na superfície de separação de dois fluidos, sendo água e ar os mais comuns pelo que serão, aqui, considerados como exemplos típicos. Em equilíbrio no campo gravítico da Terra, a superfície que separa os dois fluidos é plana e horizontal (para distâncias curtas comparadas com o raio da Terra), servindo como referência, ficando a água abaixo e o ar acima deste plano. Nesta primeira abordagem, o ar serve, apenas, para manter uma pressão atmosférica que se admite ser constante e uniforme na superfície de separação — mais adiante, será discutido qualitativamente o efeito que uma onda de gravidade tem no ar. A água é considerada um fluido incompressível (i.e., densidade constante), sem viscosidade.
Uma pequena perturbação na superfície afastá-la-á do plano de referência, elevando-a acima do plano numas zonas e baixando-a noutras zonas. Imaginemos dois pontos na água à mesma distância do plano de referência (FIGURA 1).
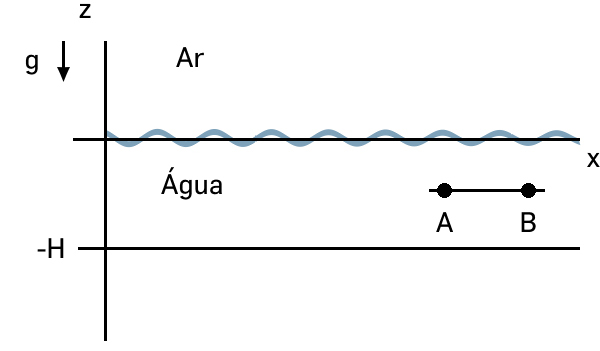
O ponto A, situado abaixo de uma elevação instantânea da superfície de separação, apresenta uma maior pressão hidrostática que a verificada no ponto B, localizado abaixo de uma depressão da mesma superfície. Esta diferença de pressões empurra a água de A para B, baixando a superfície em A e subindo-a em B, originando, assim, uma propagação destas alterações na superfície — esta propagação é a onda de gravidade. Começaremos por estudar o caso mais simples: ondas longas em águas rasas, conceitos que se tornarão precisos mais adiante. Designamos por \(H\) a profundidade da água, i.e., a distância do plano de referência ao fundo, suposto plano e horizontal, onde assenta a água. Iremos, aqui, apenas considerar que a onda de gravidade se propaga numa única direção que tomaremos para eixo \(x\); o eixo \(z\) tem a direção vertical; e o eixo \(y\), que não desempenhará qualquer papel nesta abordagem, é perpendicular aos anteriores, podendo admitir-se que a água está confinada a um canal ou um tanque, de largura \(b\).
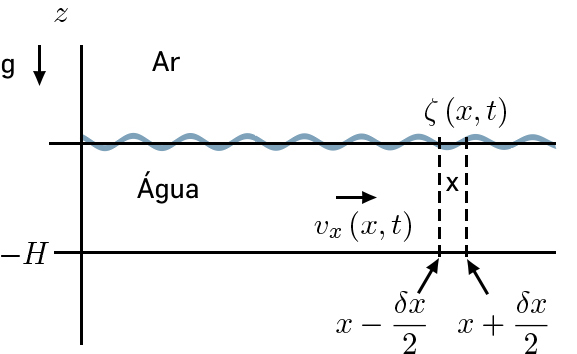
Designamos por \(\zeta \left ( x,t \right )\) a elongação instantânea que a superfície de separação apresenta num dado ponto e num dado instante: se \(\zeta >0( \zeta <\)\(0 )\), o nível da água está acima (abaixo) do plano de referência. Admitimos ser \(\zeta \ll H\): trata-se, pois, de uma pequena perturbação em relação ao equilíbrio. O movimento do fluido faz-se, essencialmente, na direção \(x\): designamos por \(v_x (x, t)\) essa velocidade, ignorando quer a componente \(v_z\), quer qualquer dependência de \(v_x\) com a profundidade, dado esta ser pequena (“águas rasas”), por hipótese. Nestas condições, as equações que regem o movimento do fluido deduzem- -se facilmente. Para isso, consideremos a porção de fluido instantaneamente situado em \(\left [ x-\frac{\delta x}{2},x+\frac{\delta x}{2} \right ]\), como se mostra na FIGURA 2. Então:
a) Conservação de massa
A massa situada no domínio indicado é \(\delta M=\rho b\left ( H+\zeta \left ( x,t \right ) \right )\delta x\), onde \(\rho\) é a massa específica do fluido (água). Deste modo, a conservação de massa impõe que, durante um pequeno intervalo de tempo \(\delta t\), o aumento da massa \(\delta M\) seja igual à massa que entra naquele domínio. Ora, em \(x-\frac{\delta x}{2}\), entra a massa:
\(\rho b\left ( H+\zeta \left ( x-\frac{\delta x}{2},t \right ) \right )v_x\left ( x-\frac{\delta x}{2} \right )\delta t\simeq \rho bHv_x\left ( x-\frac{\delta x}{2},t \right )\delta t\)
e em \(x+\frac{\delta x}{2}\) sai a massa \(\rho bHv_x\left ( x+\frac{\delta x}{2},t \right )\delta t\). Então:
\(\delta t\frac{d}{dt}\delta M=\delta t\rho b\frac{\partial \zeta }{\partial t}\delta x=\rho bH\delta t\left [ v_x\left ( x-\frac{\delta x}{2},t \right )-v_x\left ( x+\frac{\delta x}{2},t \right ) \right ]=-\rho bH\delta t\frac{\partial v_x}{\partial x}\delta x\)
Isto é:
\(\frac{\partial \zeta }{\partial t}=-H\frac{\partial v_x}{\partial x}\) (1)
b) Lei fundamental da dinâmica
Ignorando a tensão superficial, que será considerada mais adiante, a pressão no interior da água é suposta ser a pressão hidrostática, que deve reduzir-se à pressão atmosférica \((p_a)\) na superfície de separação, i.e., \(p=p_a+p_g\left ( \zeta \left ( x,t \right )-z \right )\). Então:
\(\rho\frac{\partial v_x}{\partial t}=-\frac{\partial p}{\partial x}=-pg\frac{\partial \zeta }{\partial x}\)
Isto é:
\(\frac{\partial v_x}{\partial t}=-g\frac{\partial \zeta }{\partial x}\) (2)
Combinando as equações 1 e 2, obtém-se:
\(\frac{\partial ^{2}\zeta }{\partial t^{2}}=c_{0}^{2}\frac{\partial ^{2}\zeta }{\partial x^{2}}\) (3)
onde:
\(c_0=\sqrt{gH}\) (4)
é a velocidade de propagação das ondas de gravidade nas condições referidas. A velocidade do fluido \(v_x\) satisfaz à mesma equação 3, conhecida genericamente por equação de onda[3] (a uma dimensão espacial). Note-se a ausência de dispersão (\(c_0\) é uma constante), em contraste com o que acontece quando se considera a tensão superficial ou profundidades arbitrárias, como se verá adiante.
Antes de prosseguirmos, é conveniente analisar a componente \(v_z\) do campo de velocidades que, recorde-se, foi ignorada. Tal será justificado se for \(v_<\ll v_x\). Ora, \(v_z\) deve anular-se no leito da água (i.e. \(z = −H\)) e atingir o seu maior valor, \(v_z=\dot{\zeta }\), na superfície de separação. Então, podemos ignorar \(v_z\) se for \(\left | \dot{\zeta } \right |\ll \left | v_x \right |\) ou, pela equação 1, \(H\left | \frac{\partial v_x}{\partial x} \right |\ll \left | v_x \right |\). Se \(v_x\) variar periodicamente numa distância \(\lambda \), como acontece numa onda, então \(\frac{\partial v_x}{\partial x}\sim \frac{v_x}{\lambda}\). Assim, a condição anterior fica \(\lambda \gg H\), o que justifica a designação de “ondas longas em águas rasas”.
Tem muita importância e interesse analisar as soluções harmónicas da equação 3. Estas soluções dependem do tempo através das funções trigonométricas seno ou co-seno. Como a equação 3 é linear, é válido o princípio da sobreposição pelo que podemos genericamente estudar soluções do tipo onda plana e monocromática:
\(\zeta \left ( x,t \right )\equiv \mathrm{Re} \left [ \hat{\zeta }_0e^{ik_{x}x-i\omega t} \right ]\) (5)
onde \(\hat{\zeta }_0\) é a amplitude (complexa) da onda, \(\omega\) é a frequência angular e \(k_x\) é o vetor de onda. Observemos que estas soluções são periódicas no tempo com o período:
\(T=\frac{2\pi}{\omega}\) (6)
sendo habitual designar por frequência o inverso do período. Analogamente, vemos que \(\zeta \left ( x,t \right )\) é espacialmente periódica, sendo o período espacial conhecido por comprimento de onda (o seu inverso é o número de onda).
\(\lambda =\frac{2\pi}{k_x}\) (7)
Inserindo a expressão (5) na equação 3, obtemos a relação de dispersão:
\(k_x=\pm \frac{\omega}{c_0}\) (8)
No caso presente, a relação é linear e a ela nos referimos pela frase “ondas sem dispersão”, como também acontece em ondas acústicas e eletromagnéticas (no vazio), mas não é o caso geral. É fácil ver que a solução \(k_x>0\) representa uma onda que se propaga para a direita, enquanto \(k_x<\)\(0\) representa uma onda que se propaga para a esquerda. Aceitando \(k_x>0\), a fase da onda de amplitude é a função:
\(\phi \left ( x,t \right )=k_xx-\omega t\)
Vemos que a fase em \(\left ( x,t \right )\) é a mesma em \(\left ( x+\delta x,t+\delta t \right )\) se \(\delta x=\frac{\omega}{k_x}\delta t\); assim, \(\frac{\omega}{k_x}\) é, genericamente, a velocidade de propagação de fase, sendo, no caso presente, igual a \(c_0\).
Usando a equação 4, vemos que esta velocidade é 1m/s para H=10 cm (onda de lavatório), 10 m/s para H=10 m (onda de mar) e 200 m/s para H=4000 m (tsunami).
Não se deve confundir a velocidade de fase da onda com a velocidade do fluido — esta oscila sinusoidalmente e o seu valor depende das condições iniciais; aquela representa a velocidade de propagação dos máximos (ou mínimos) da amplitude à superfície.
A propagação de uma onda de gravidade faz-se acompanhar de uma propagação de energia. De facto, a energia contida, num dado instante, entre os planos verticais \(x = x_1\) e \(x = x_2 > x_1\) é constituída por duas parcelas:
1.ª Energia cinética
\(K\left ( t \right )=\int_{x_1}^{x_2}dx\frac{1}{2}\rho bHv_{x}^{2}\)
2.ª Energia potencial gravítica
\(U\left ( t \right )=\int_{x_1}^{x_2}dx\int_{-H}^{\zeta }dz\rho bgz=\int_{x_1}^{x_2}dx\frac{1}{2}\rho gb\left ( \zeta ^{2}-H^2 \right )\)
Assim:
\(E\left ( t \right )=K\left ( t \right )+U\left ( t \right )=\frac{1}{2}\int_{x_1}^{x_2}dxb\rho \left ( Hv_{x}^{2}+g\left ( \zeta ^2-H^2 \right ) \right )\)
Então:
\(\frac{dE}{dt}=\int_{x_1}^{x_2}dxb\rho \left ( Hv_x\frac{\partial v_x}{\partial t}+g\zeta \frac{\partial \zeta }{\partial t} \right )=-\int_{x_1}^{x_2}dxb\rho \left ( Hgv_x\frac{\partial \zeta }{\partial x}+Hg\zeta \frac{\partial v_x}{\partial x} \right )=-\int_{x_1}^{x_2}dxb\rho gH\frac{\partial }{\partial x}\left ( \zeta v_x \right )\)
Aqui, usamos as equações 1 e 2 para obter o resultado final. Identificamos o fluxo de energia:
\(J\left ( x,t \right )\equiv \rho gbH\zeta \left ( x,t \right )v_x\left ( x,t \right )=\rho bc_{0}^{2}\zeta \left ( x,t \right )v_x\left ( x,t \right )\) (9)
Com efeito, o resultado anterior pode escrever-se:
\(\frac{dE}{dt}=J\left ( x_1,t \right )-J\left ( x_2,t \right )\)
que, por palavras, se lê: o aumento, por unidade de tempo, da energia no intervalo \(\left [ x_1,x_2 \right ]\) é igual à energia que entra em \(x_1\) menos a energia que sai em \(x_2\).
Para calcularmos este fluxo, temos de usar as representações reais dos campos \(\zeta \) e \(v_x\). Mas se quisermos calcular a média sobre um período de oscilação, o resultado é bastante simples:
\(\left \langle J\left ( x \right ) \right \rangle=\frac{1}{2}\rho bc_{0}^{2} \mathrm{Re} \left [ \zeta v_{x}^{*} \right ]\) (10)
(o asterisco representa complexo conjugado). Considerando, por exemplo, a onda monocromática atrás escrita, começamos por notar que a equação 2 dá \(v_x=\frac{k_xg}{\omega}\zeta =\frac{g}{c_0}\), pelo que:
\(\left \langle J\left ( x \right ) \right \rangle=\frac{1}{2}\rho bgc_0\left | \hat{\zeta }_0 \right |^{2}\) (11)
Uma onda de 1 m de amplitude no mar com a profundidade de 4000 m transporta a mesma energia que uma onda de ~ 4.5 m quando a profundidade é de 10 m. É esta a força destruidora de um tsunami. No canhão da Nazaré, a amplitude ainda é maior porque a largura b torna-se muito menor nas proximidades da praia — a onda fica encurralada, sendo obrigada a subir em altura.
O efeito da tensão superficial
A tensão superficial é uma força que se manifesta na superfície de um fluido e que tem origem na parte atractiva das forças moleculares. A sua caracterização é simples: imaginemos uma curva fechada na superfície — em cada elemento da linha, de comprimento \(dl\), a tensão superficial é a força exercida pela parte da superfície no exterior da linha, sendo tangente à superfície e perpendicular à linha, dirigida para o exterior da curva, com o valor \(\sigma dl\), onde \(\sigma \) é uma constante. Consideremos a FIGURA 2 e atentemos na porção de superfície em \(\left [ x-\frac{\delta x}{2},x+\frac{\delta x}{2} \right ]\). A tangente à linha, em qualquer ponto, é o vetor \(\left ( 1,0,\zeta '\left ( x,t \right ) \right )\), onde a plica indica derivada em ordem a \(x\), podendo considerar-se normalizada à unidade porque temos vindo a desprezar termos quadráticos em \(\zeta\). Assim, a tensão superficial é \(\sigma b\left ( 1,0,\zeta '\left ( x+\frac{\delta x}{2},t \right ) \right )\), no extremo direito daquele intervalo, e \(-\sigma b\left ( 1,0,\zeta '\left ( x-\frac{\delta x}{2},t \right ) \right )\), no extremo esquerdo. A resultante destas forças é, pois, \(\sigma b\zeta^"\delta x\) segundo o eixo vertical.
Devido a isto, a pressão exercida pelo fluido num ponto da superfície não é mais igual à pressão atmosférica, tendo-se, agora, \(p\left ( x,\zeta \right )b\delta x+\sigma b\zeta ^{"}\delta x=p_ab\delta x\), i.e., \(p\left ( x,\zeta \right )=p_a-\sigma \zeta ^{"}\). Assim, no interior do fluido, o campo hidrostático da pressão é \(p\left ( x,z \right )=p\left ( x,\zeta \right )+pg\left ( \zeta -z \right )=p_a-\sigma\zeta ^{'}+pg\left ( \zeta -z \right )\), o que modifica a equação 2, obtendo-se:
\(\rho\frac{\partial v_x}{\partial t}=-\frac{\partial p}{\partial x}=-\rho g\frac{\partial \zeta }{\partial x}+\sigma\frac{\partial ^3\zeta }{\partial x^3}\)
A equação 1, exprimindo a conservação de massa, não é modificada. Eliminando a velocidade entre estas equações, obtemos:
\(\frac{\partial ^2\zeta }{\partial t^2}=H\left [ g\frac{\partial ^2\zeta }{\partial x^2}-\frac{\sigma}{\rho}\frac{\partial ^4\zeta }{\partial x^4} \right ]\)
Para uma onda plana monocromática, é \(\zeta \propto e^{i\omega t+ik_xx}\), deduzindo-se a relação de dispersão:
\(\omega^2=gHk_{x}^{2}\left ( 1+a^2k_{x}^{2} \right )\) (12)
onde \(a=\sqrt{\frac{\sigma}{\rho g}}\) é conhecida por constante capilar. Existe, pois, dispersão de ondas que, porém, pode ser ignorada se \(k_xa\ll 1\). Para a água é \(\sigma\)=72.8x10-3 N/m, pelo que \(a\) ≃3 mm.
Assim, a tensão superficial não pode ser ignorada para comprimentos de onda inferiores a \(2\pi a\simeq \)1.8 cm. As ondas de gravidade na água de uma bacia ou no lavatório são, essencialmente, dominadas pela tensão superficial — sendo designadas por ondas gravitocapilares.
Generalização para profundidade arbitrária
Neste caso, temos de considerar as duas componentes da velocidade da água, pelo que a equação de movimento fica:
\(\rho \frac{\partial \vec{v}}{\partial t}=\bigtriangledown p+\rho \vec{g}=-\bigtriangledown \left ( p-p_a+\rho gz \right )\) (13)
No segundo membro, incluímos, por comodidade, a pressão atmosférica, constante; e vemos que, sendo este segundo membro um gradiente, então também se terá:
\(\vec{v}=\bigtriangledown \varphi \) (14)
Esta função \(\varphi\) é designada por potencial velocidade. Assim, substituindo na equação 13, tem-se:
\(\rho \frac{\partial \varphi}{\partial t}=-\left ( p-p_a \right )-\rho gz\) (15)
A incompressibilidade assumida para a água traduz-se por:
\(\bigtriangledown \cdot \vec{v}=0\; \rightarrow \; \Delta\varphi=0\) (16)
Procuremos, agora, soluções em que, à superfície da água, se tenha um deslocamento tal como na equação 5. Será, então, de esperar que o potencial velocidade apresente a mesma dependência no tempo e na coordenada \(x\), i.e., da forma:
\(\varphi= \mathrm{Re} \left [ \hat{f}\left ( z \right )e^{ik_xx-i\omega t} \right ]\) (17)
Substituindo na equação 16, obtém-se:
\(\frac{d^2\hat{f}}{dz^2}-k_{x}^{2}\hat{f}=0\)
A solução geral desta equação é uma combinação linear de seno e co-seno hiperbólicos. Ora, sabemos que, no leito da água \(\left (z =-H \right )\) deve ser \(v_z = 0\), i.e.,
\(\left ( \frac{\partial \varphi}{\partial z} \right )_{z=-H}=0\Leftrightarrow \left ( \frac{\partial \hat{f}}{\partial z} \right )_{z=-H}=0\)
Assim, a solução procurada é:
\(\hat{f}=\hat{f}_0ch\left ( k_x\left ( z+H \right ) \right )\)
Na superfície livre da água \(\left ( z=\zeta \right )\), tem-se:
\(v_z\left ( x,\zeta ,t \right )=\dot{\zeta }\Leftrightarrow \left ( \frac{\partial \varphi}{\partial z} \right )_{z=\zeta }=\dot{\zeta }\) (19)
Usando as equações 5, 17 e 18, e aceitando ser \(\zeta \ll H\), obtém-se:
\(k_x\hat{f}_0sh\left ( k_xH \right )=-i\omega \hat{\zeta }_0\)
E, da equação 15, tira-se:
\(-i\omega \hat{f}_0ch\left ( k_xH \right )=-g\hat{\zeta }_0\)
Estas duas equações fornecem a relação de dispersão:
\(\omega^2=gk_xth\left ( k_xH \right )\) (20)
Vemos, aqui, outro exemplo de uma relação não linear entre a frequência angular e o vetor de onda, originando dispersão das ondas com diferentes frequências. E vemos que a solução antes estudada é um caso particular desta: ondas longas em águas rasas significa, apenas, \(k_xH\ll 1\).
Tem interesse estudar com algum detalhe o campo de velocidades. Admitindo, para simplificar, que \(\hat{\zeta }_0\) é real, deduz-se das equações 14 e 17:
\(v_x=\frac{\partial \varphi}{\partial x}=\frac{gk_x\zeta _0}{\omega}\frac{ch\left ( k_x\left ( z+H \right ) \right )}{ch\left ( k_xH \right )}\cos \left ( k_xx-\omega t \right )\)
\(v_z=\frac{\partial \varphi}{\partial z}=\frac{gk_x\zeta _0}{\omega}\frac{ch\left ( k_x\left ( z+H \right ) \right )}{sh\left ( k_xH \right )}\sin \left ( k_xx-\omega t \right )\)
Consideremos a vizinhança de um ponto \(\left ( x_0,z_0 \right )\) no interior da água, podendo, assim, substituir estes valores nos segundos membros das equações acima. Para uma “partícula” de água nesta vizinhança, a sua trajetória é definida por:
\(\frac{dx}{dt}=v_x\left ( x_0,z_0,t \right )=\frac{gk_x\zeta _0}{\omega}\frac{ch\left ( k_x\left ( z_0+H \right ) \right )}{ch\left ( k_xH \right )}\cos \left ( k_xx_0-\omega t \right )\)
\(\frac{dz}{dt}=v_z\left ( x_0,z_0,t \right )=\frac{gk_x\zeta _0}{\omega}\frac{sh\left ( k_x\left ( z_0+H \right ) \right )}{ch\left ( k_xH \right )}\sin \left ( k_xx_0-\omega t \right )\)
Assim, por simples integração, obtém-se a trajetória:
\(x\left ( t \right )-x_0=-\frac{gk_x}{\omega^2}\zeta _0\frac{ch\left ( k_x\left ( z_0+H \right ) \right )}{ch\left ( k_xH \right )}\sin \left ( k_xx_0-\omega t \right )\)
\(z\left ( t \right )-z_0=-\frac{gk_x}{\omega^2}\zeta _0\frac{sh\left ( k_x\left ( z_0+H \right ) \right )}{ch\left ( k_xH \right )}\cos \left ( k_xx_0-\omega t \right )\)
Então:
\(\left ( \frac{x\left ( t \right )-x_0}{\zeta _0ch\left ( k_x\left ( z_0+H \right ) \right )} \right )^{2}+\left ( \frac{z\left ( t \right )-z_0}{\zeta _0sh\left ( k_x\left ( z_0+H \right ) \right )} \right )^{2}=\left ( \frac{gk_x}{\omega^2ch\left ( k_xH \right )} \right )^2\)
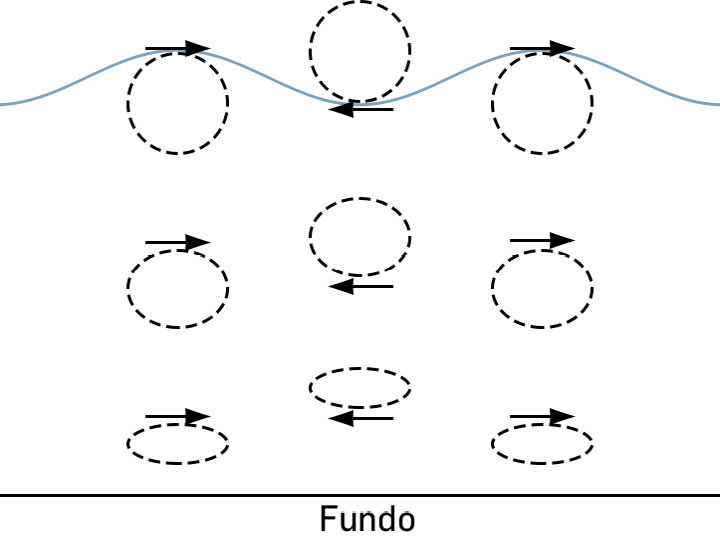
As trajetórias são elipses, alongadas na direção de progressão da onda à superfície (eixo \(x\)) e o eixo menor é tanto mais pequeno quanto maior a profundidade (\(z_0\) mais negativo), anulando-se no leito da água (FIGURA 3). À superfície, onde esta ondulação é mais forte, ela é bem sentida por quem boiar, no mar, longe da zona de rebentação.
Nota final
O ar, acima da água, apenas serviu, no exposto, para fixar a pressão atmosférica. Contudo, a situação é bem mais interessante: as vibrações da onda de gravidade na superfície induzem ondas sonoras no ar. Para uma onda de gravidade plana e monocromática, como as que consideramos, a frequência angular \(\omega\) e o vetor de onda \(k_x\) impõem o padrão espaço temporal das vibrações à superfície, exigindo esses valores para a onda sonora. Porém, esta propaga-se segundo \(x\) e \(z\): assim, a onda sonora é representada por \(e^{-i\omega t+ik_xx+ik_zz}\) e tem a relação de dispersão \(\omega^2=c_{s}^{2}\left ( k_{x}^{2}+k_{z}^{2} \right )\), onde \(c_s\) é a velocidade do som, da ordem de 340m/ s.
Ora, com \(\omega = c_0k_x)\) para a onda de gravidade, então deduzimos que \(k_{z}^{2}=\omega^2\left ( \frac{1}{c_{s}^{2}}-\frac{1}{c_{0}^{2}} \right )\).
Habitualmente, é \(c_s > c_0\), pelo que \(k_z\) é imaginário: a onda sonora amortece à medida que se afasta da superfície de separação. Na situação oposta, \(c_s <\) \(c_0\), a onda sonora propaga- se sem amortecimento, transportando energia das vibrações na superfície: agora, é a onda de gravidade que experimenta atenuação! Não prosseguiremos esta interessante análise.
Notas
a) Não confundir com as ondas gravitacionais da Relatividade Geral
b) Podia adicionar-se a (15) uma constante que só poderia depender do tempo, mas tal não tem importância porque só as derivadas espaciais têm significado físico: são as componentes da velocidade
Referências
- ↑ LAGE, E., Mecânica dos Fluidos, Rev. Ciência Elem., V6(4):084. (2018). DOI: 10.24927/rce2018.084.
- ↑ LAGE, E.,
Ondas,
- ↑ LAGE, E., Fluidos, Rev. Ciência Elem., V6(4):071. (2018). DOI: 10.24927/rce2018.071.
Criada em 3 de Março de 2021
Revista em 19 de Março de 2021
Aceite pelo editor em 14 de Outubro de 2022
